Swing-up and Balancing Control of an Inverted Pendulum
In this mini project, nonlinear control strategies for the swing-up control of an inverted pendulum on a cart (i.e. the cart-pole system) is explored. The controller is verified in a simulation. Let’s take a look at how it works in the video below. Only the pendulum is visualized, and the cart is not visible.
Source code for this project is available at https://github.com/YifanJiangPolyU/cart-pole-nonlinear-control
The System
A cart-pole system is a classical example used in control engineering. It is something that looks like Figure 1.
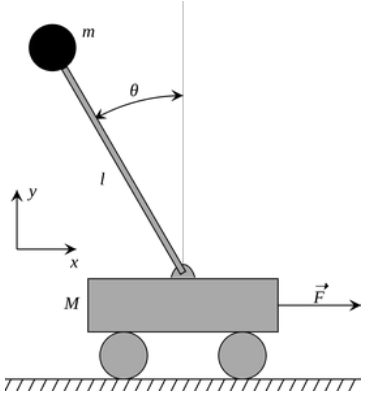
A pendulum (the pole) freely rotates on a shaft mounted on a moving cart. The shaft is NOT actuated, and the only control action applicable is a force on the cart.
The Algorithm
Initially, the pendulum is at its stable equilibrium position (i.e. lowest position). The control algorithm does 2 jobs. First, it tires to move the cart so that the pendulum swings up to the unstable equilibrium position (i.e. the highest position). Second, it tries to balance the pendulum at its unstable equilibrium.
The swing-up part of the job is more interesting and more challenging. The during swing-up, the pendulum travels through highly nonlinear regions of the state space, rendering conventional linear system techniques unusable. Further more, the system is under-actuated, and when the pendulum is horizontal, moving the cart does not generate any effect on the pendulum (even for a very brief moment).
The method implemented here was mentioned in the course materials of MIT OpenCourseWare 6.832, Underactuated Robotics This method transforms the swing-up control problem into the regulation problem of an energy-like term. Namely, the energy error term is defined as follows:
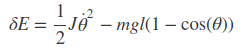
In the equation, J is the moment of inertia of the pendulum, and g is the gravitational acceleration. Other notations are consistent with Figure 1. Note that when the pendulum is at upright position, the energy error term goes to zero. A regulator is then added to drive the energy error to zero, which is effectively the same as making the pendulum approach the upright position.
When the pendulum is close enough to the upright position, the system can effectively be replaced by its linearization about the upright position. At this moment, the energy error regulator is simply switched off and a linear quadratic regulator (LQR) takes over to balance the pendulum.
Leave a Comment